High Accuracy Visual Inertial SLAM or Autonomous Navigation of small UAVs
Keywords: Robotics,Visual Inertial SLAM, Visual Inertial Odometry, Optimiaztion
Thesis
Abstract
Motivation
Unmanned Aerial Vehicles (UAVs) require accurate pose estimates with low latency in order to achieve a robust and stable flight behavior. However, due to the power and payload restrictions of aerial platforms, state estimation algorithms must provide these qualities under computational constraints. Monocular Visual Inertial Odometry (VIO) systems, consisting of a camera and an Inertial Measurement Unit (IMU), can satisfy these constraints and form the minimum sensor suite for metric 6 Degree of Freedom (DoF) pose estimation.
Approach
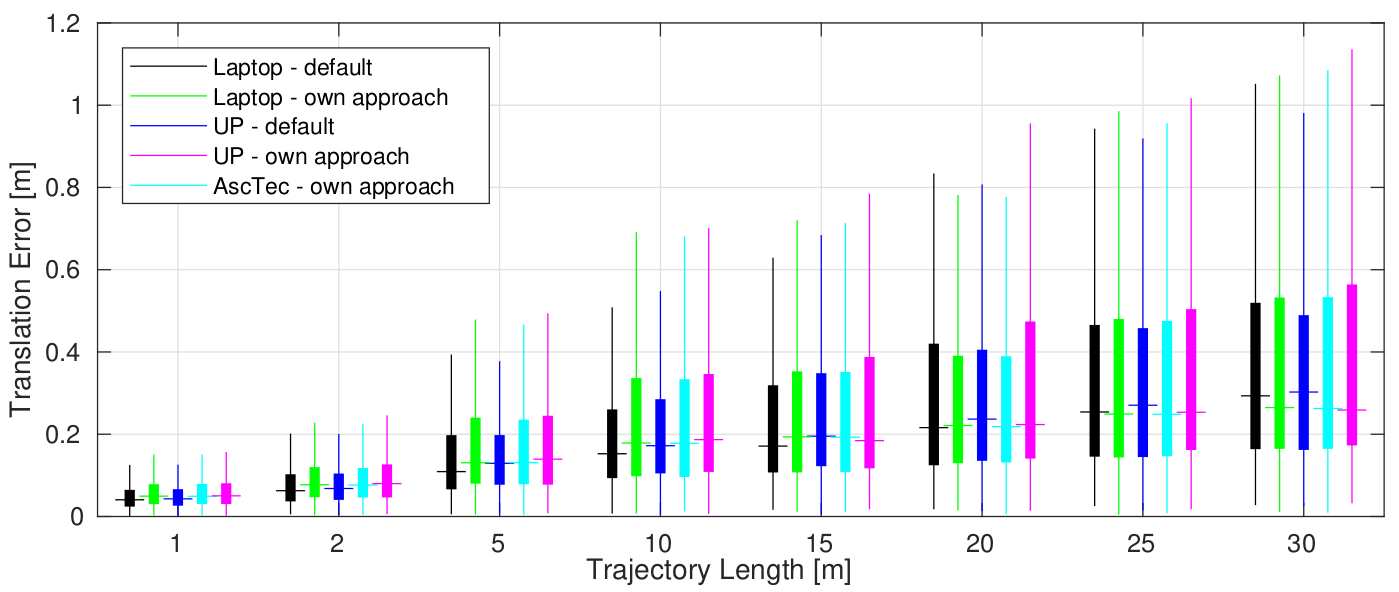
In this work, we propose an accurate keyframe based monocular VIO pipeline for onboard state estimation of UAVs. The publicly available Visual Inertial (VI) Simultaneous Localization and Mapping (SLAM) system VINS-Mono is therefore adapted. The performance of the VIO pipeline is evaluated for different parameter settings. Based on these evaluations, we propose a VIO pipeline running in real-time while only exhibiting a little loss in accuracy compared to the default implementation of VINS-Mono.
Result
The proposed VIO pipeline is extensively tested on all sequences of the EuRoC dataset. Furthermore, the real-time applicability is confirmed by deploying and running the VIO pipeline on a real UAV.