Abstract
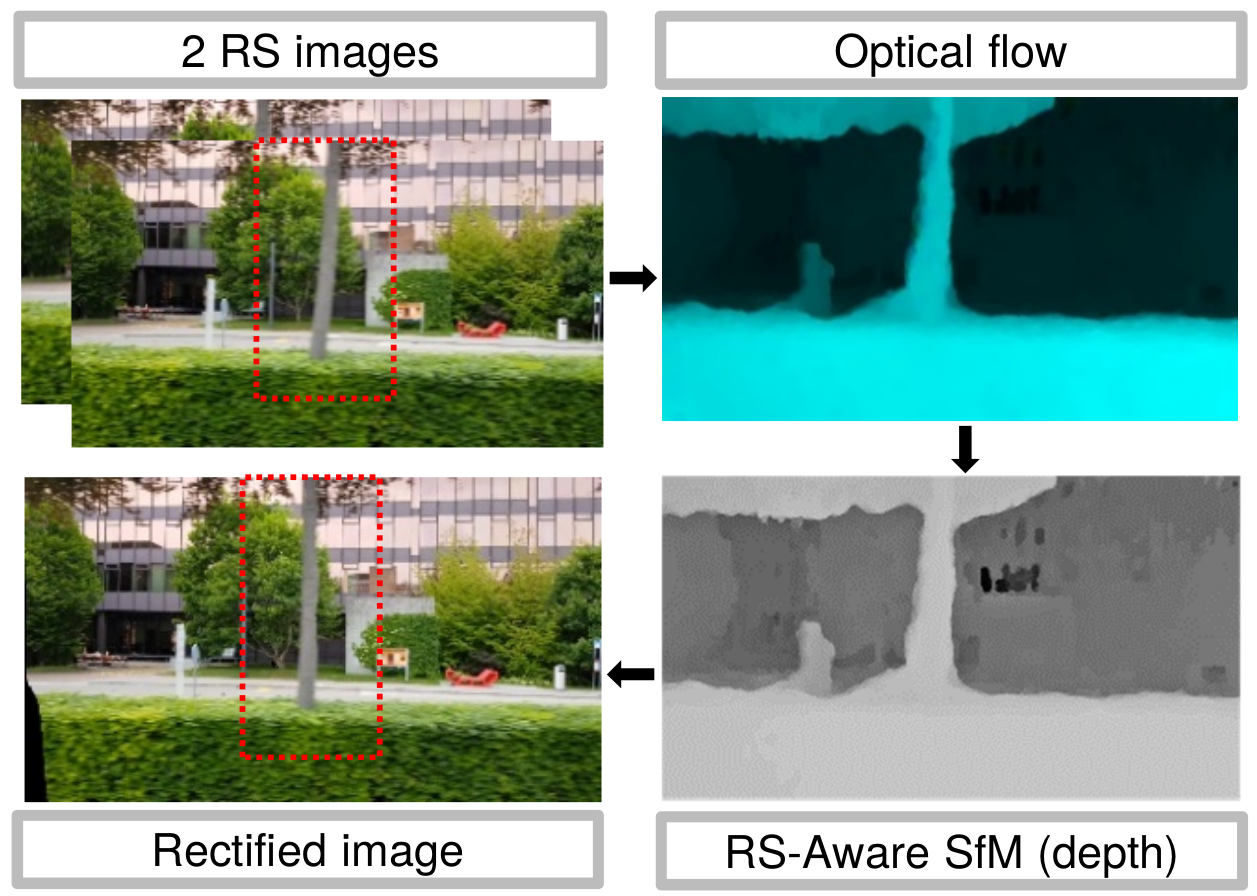
In this work we implement a method to rectify the distortion of a Rolling-Shutter camera and estimate its relative motion. A modified differential Structure-from-Motion (SfM) algorithm proposed by Zhuang et al. [1] is used to correct this distortion. We provide a detailed description and present experimental results on both synthetic and real world data. We show that the approach results in good rectification given an accurate optical flow estimate.
References
[1] B. Zhuang, L. F. Cheong, and G. H. Lee, “Rolling-Shutter-Aware Differential SfM and Image Rectification,” in 2017 IEEE International Conference on Computer Vision (ICCV), 2017, pp. 948–956.