Thomas Ziegler
Computer Vision & Robotics Student
Personal statement
I am currently a master student at D-ITET at ETH Zurich focusing on Computer Vision, Robotics and Machine Learning. Before my master studies, I was an intern in the Fuel Economy department at Volvo Cars after I graduated my BSc in Electrical Engineering at the University of Applied Sciences of Eastern Switzerland (FHO) with honors.
Main interests: SLAM, Structure from Motion, Bundle Adjustment, Autonomous Navigation, Semantic Segmentation.
Technical skills
C/C++, Java, C#
Python, MATLAB
OpenCV, ROS, Eigen, Ceres Solver, wxWidgets, Qt
Linux, vim, LaTeX
Education
MSc in Information Technology and Electrical Engineering
Areas of specialisation: Computer Vision, Machine Learning, Robotics, Estimation and Control
2016-
BSc in Electrical Engineering
Areas of specialisation: Signal Processing, Digital Image Processing, Embedded Systems, Software Engineering
Graduated with honors
2012-2015
Projects
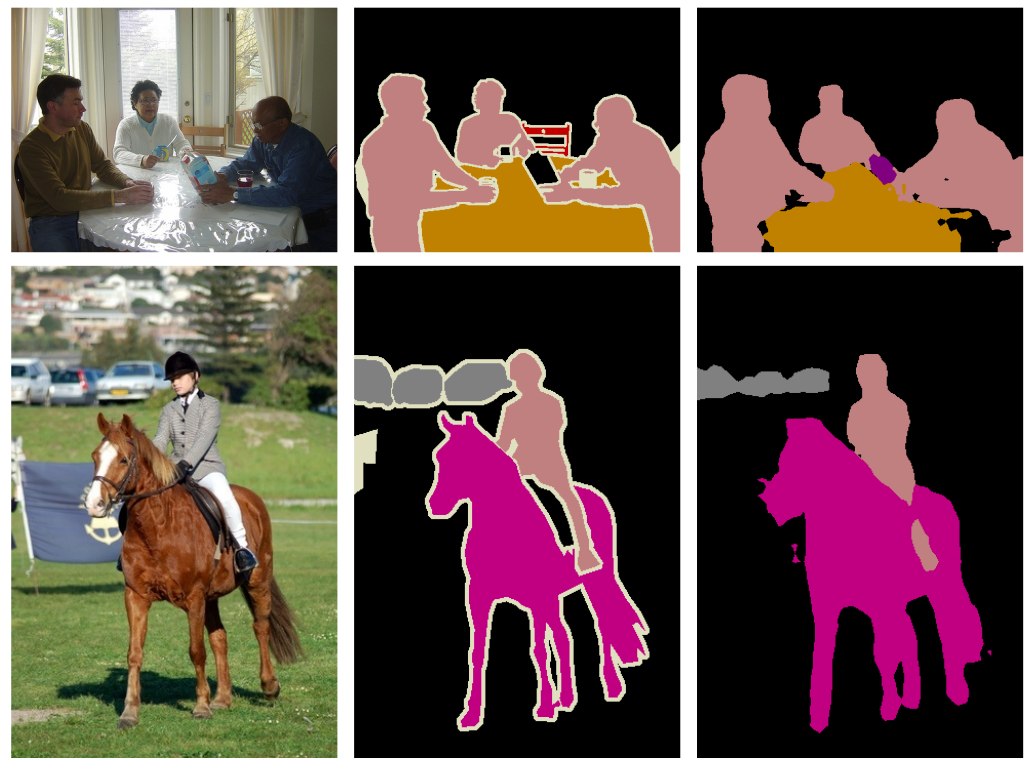
Efficient Smoothing of Dilated Convolutions for Image Segmentation
In this Deep Learing course project an efficient method to smooth dilated convolutions for image segmentation is introduced and tested against several datasets.
Details
Report Paper
GitHub
Keywords: Computer Vision, Deep Learning, Image Segmentation, Semantic Segmentation, Dilated Convolution, Atrous Convolution
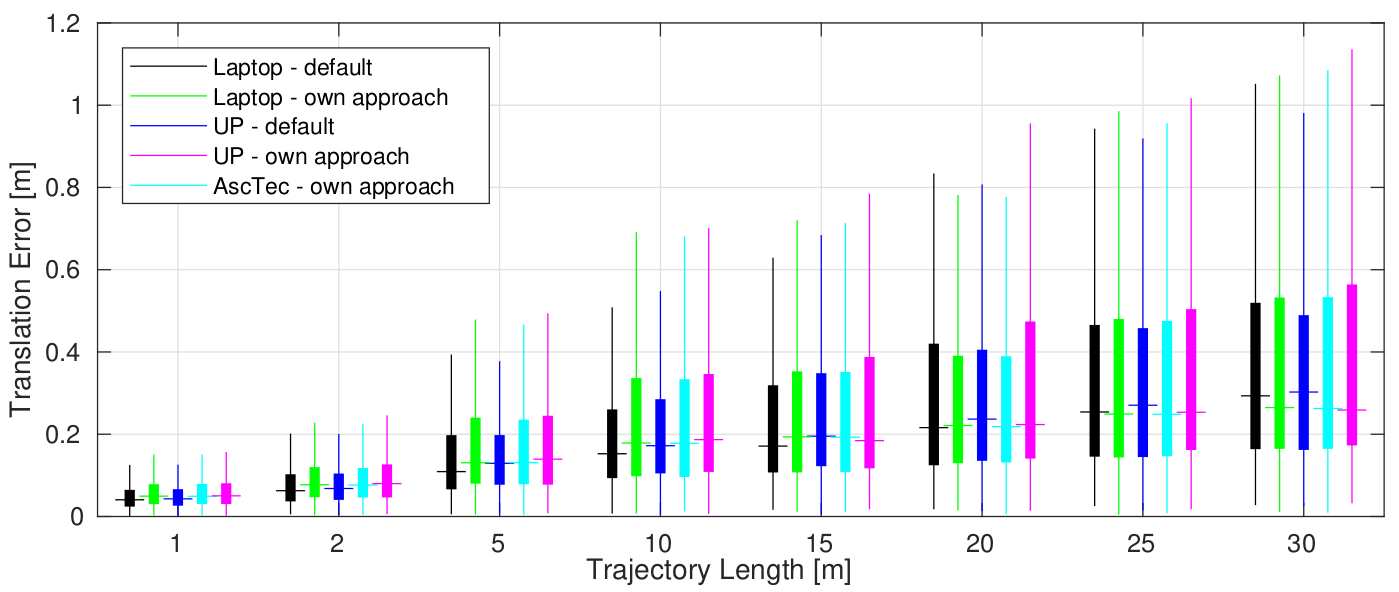
High Accuracy Visual Inertial SLAM for Autonomous Navigation of small UAVs
The goal of this project was to develop a framework achiving accurate pose estimations enabling autonomous navigation of a small UAV equipped only with visual-inertial sensors and an embedded processor with limited resources.
Details
Thesis
GitHub
Keywords: Robotics,Visual Inertial SLAM, Visual Inertial Odometry, Optimiaztion
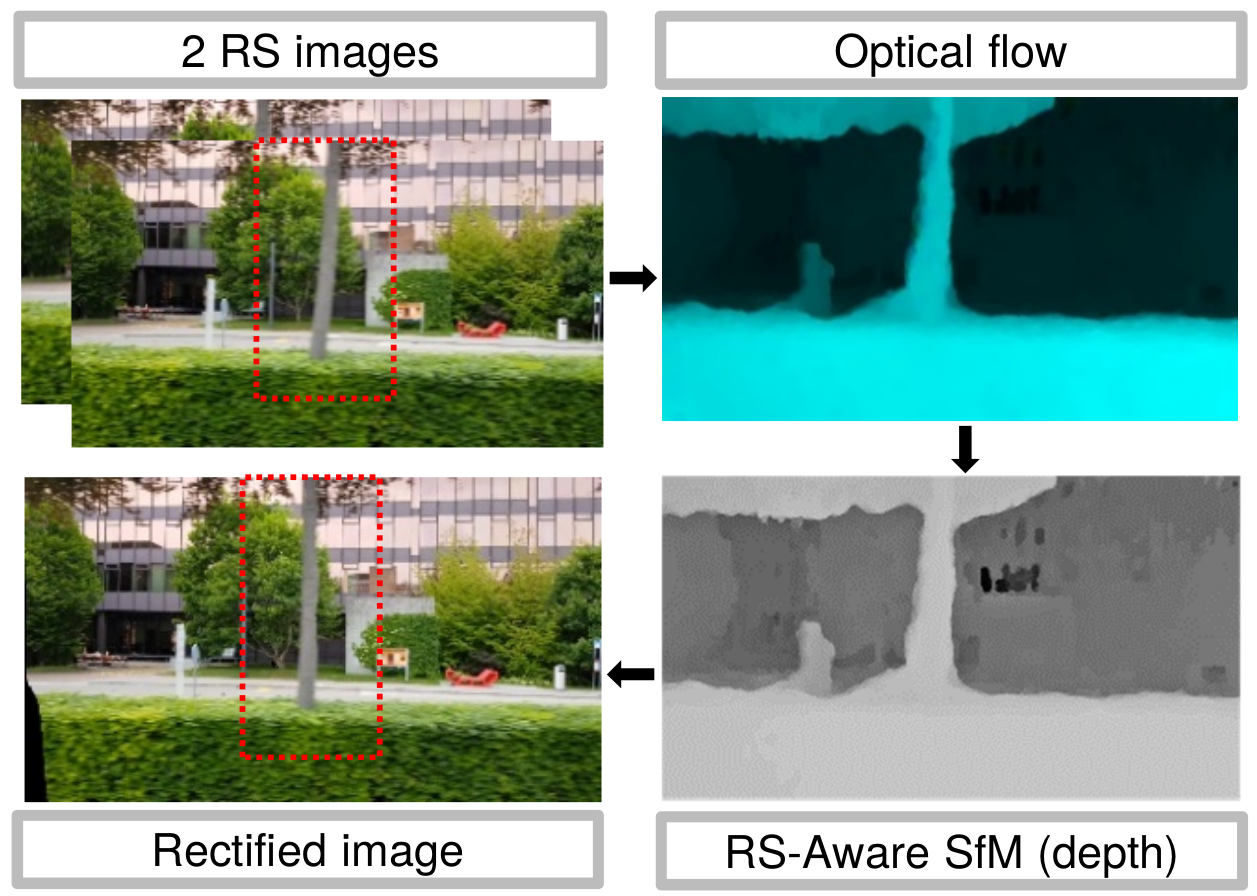
Rolling-Shutter-Aware Differential SfM and Image Rectification
Computer Vision and Geometry Group
In this 3D Vision course project a method to rectify the distortion of Rolling-Shutter camera and estimate its relative motion was implemented.
Details
Report
Poster
GitHub
Keywords: Computer Vision, Differential Structure from Motion, Rectification, Rolling Shutter, Bundle Adjustment, Optimization
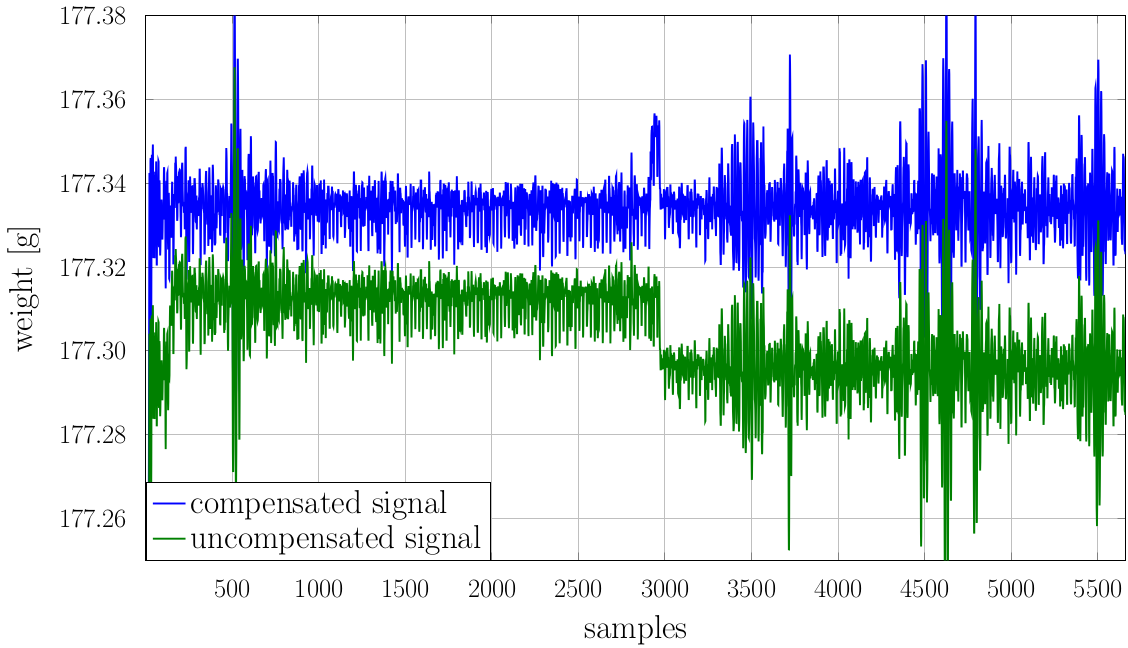
Adaptive Compensation of electromagnetic Forces
The goal of this research was to analyze the physical effects of wireless power transmission on a high precision balance. A fully automatic measurement setup was created and experiments design to capture the occuring forces. With these insights a compensation algorithm was proposed which is able to compensate 95% of the occuring weight deviation during balance measurements.
Details
Poster
Keywords: Digital Signal Processing
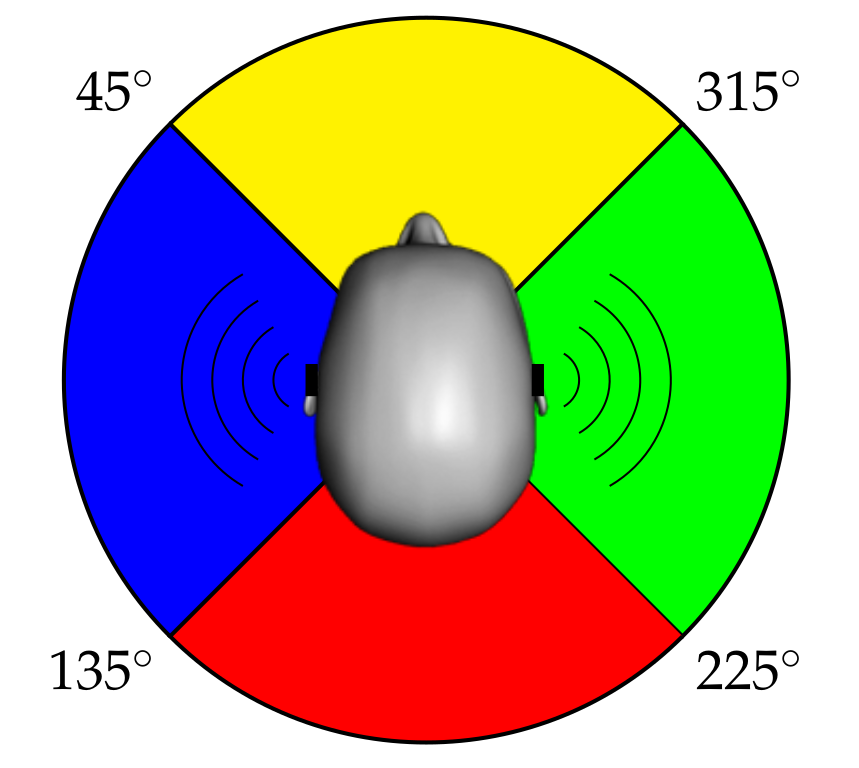
Bluetooth Low Energy based View Direction Estimation
The goal of this semester project was to estimate the view direction of an opposite person. Based on the rssi values of two Bluetooth LE beacons mounted on each side of the head a offline algorithm was developed which can classify the view direction into four regions.
Details
Keywords: Digital Signal Processing, Whireless Communication